Le 30 avril, les apprenants de la dominante mécatronique soutenaient le projet validant l’ensemble des compétences acquises dans la dominante. Le « projet mécatronique » répond à un cahier des charges précis et comprend l’analyse, la conception et la réalisation d’un système robotique basé sur un besoin client.
Créer et innover grâce au projet et au savoir – relier de la formation d’ingénieur généraliste
 Tout au long de la formation d’ingénieur généraliste de l’EIGSI, près de 300 heures de projets permettent aux étudiants une mise en pratique de savoirs faire technologiques et de savoirs scientifiques, tout en développant leur capacité à mener un projet dans sa globalité et de travailler en équipe.
Tout au long de la formation d’ingénieur généraliste de l’EIGSI, près de 300 heures de projets permettent aux étudiants une mise en pratique de savoirs faire technologiques et de savoirs scientifiques, tout en développant leur capacité à mener un projet dans sa globalité et de travailler en équipe.
Dans ce cadre, les étudiants ont analysé, conçu et réalisé un système robotique. Chacun a mis en pratique les compétences acquises durant la formation. Des compétences pluridisciplinaires que la formation d’ingénieur généraliste permet de relier entre elles : mécanique, informatique (hard et soft), génie électrique et gestion de projet Agile.
Concevoir et construire un préhenseur en bout de bras d’un robot
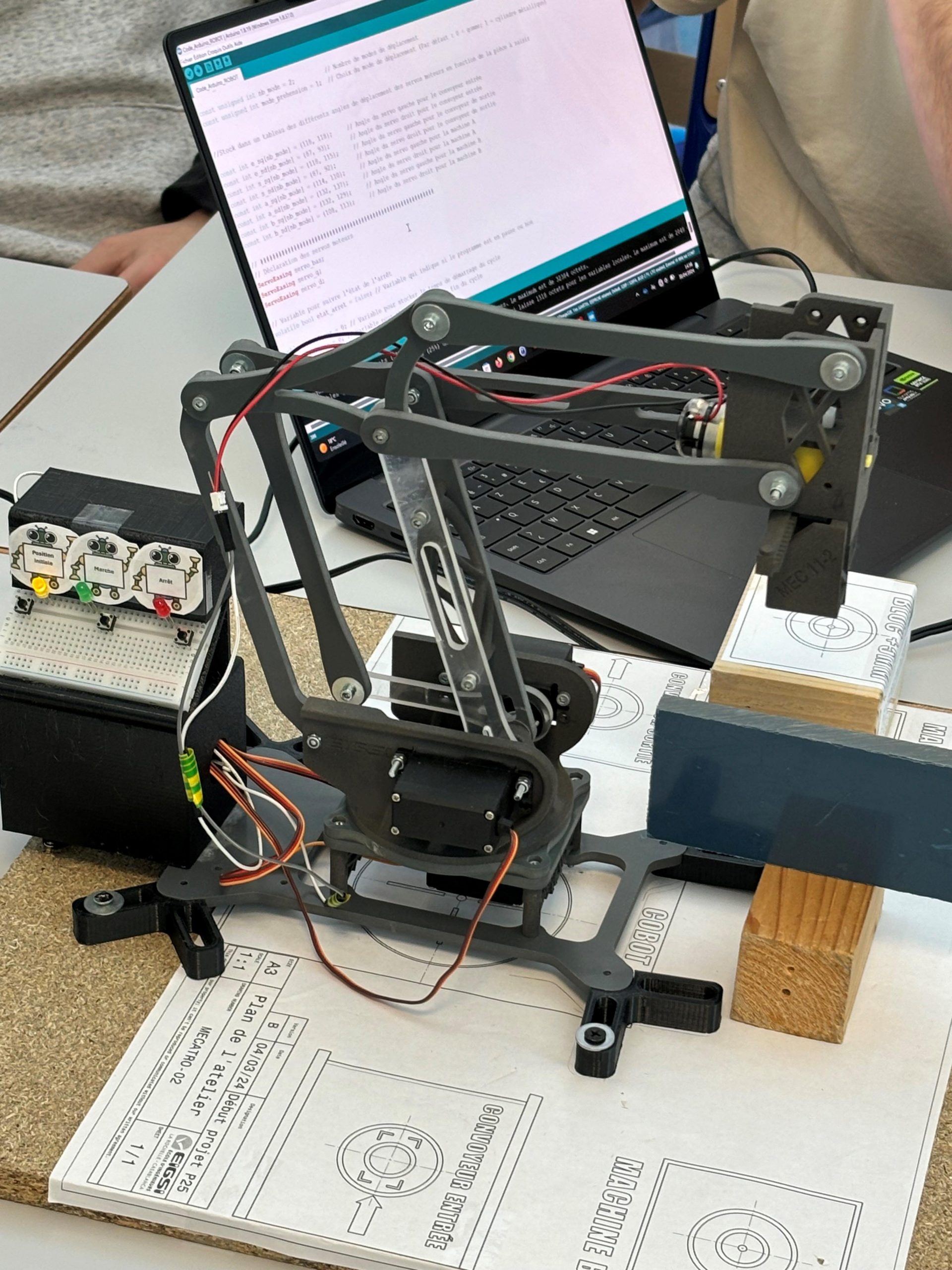
Sur la base d’un bras de robot imposé, les étudiants avaient pour objectif de proposer un système de « préhenseur » innovant. Pour cela, ils ont travaillé à la conception, la motorisation et à la programmation associée. Au final, le système robotisé doit être opérationnel et capable de déplacer une pièce depuis un point A, le convoyeur d’entrée, jusqu’à un point B, la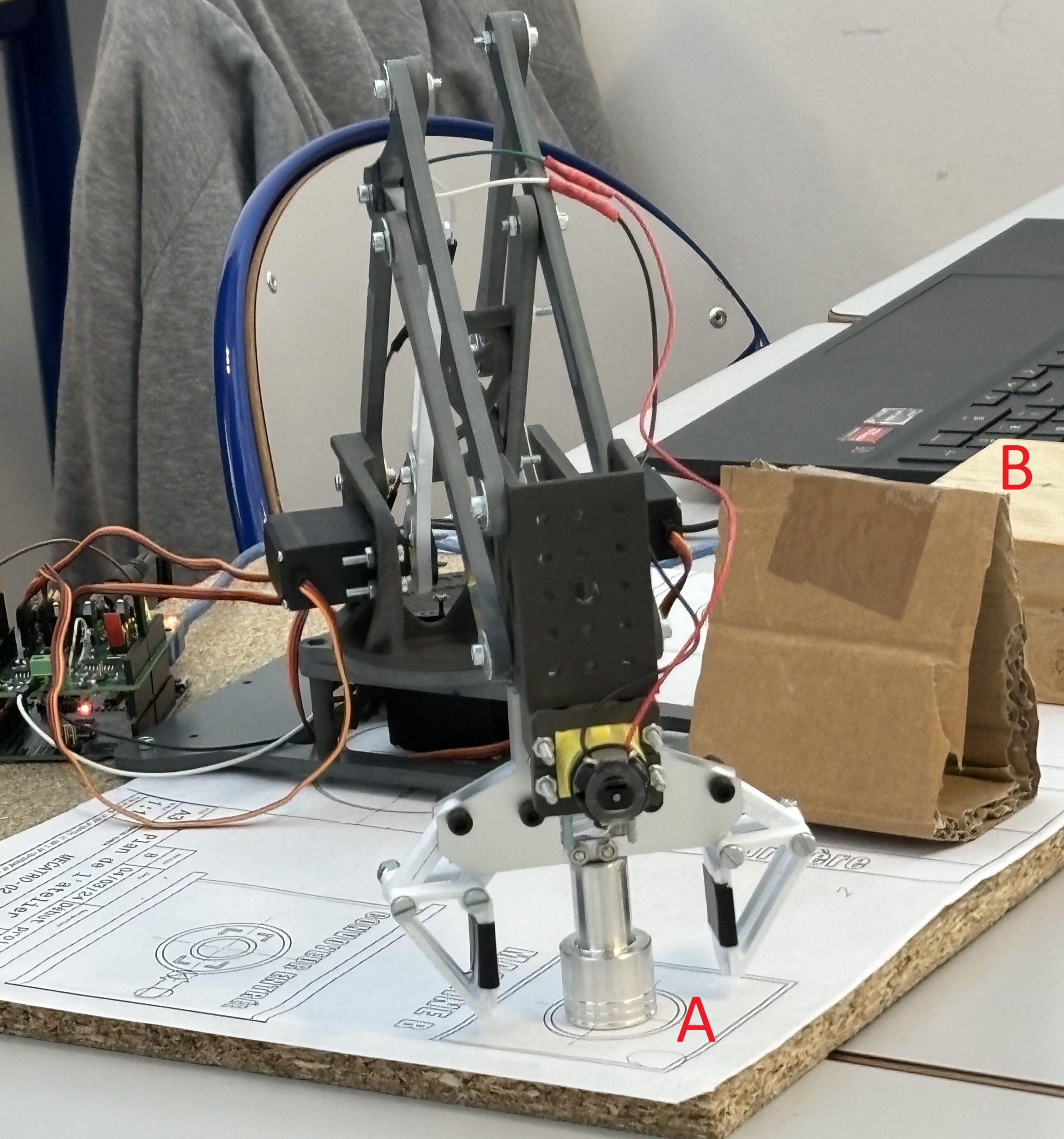 machine de traitement.
machine de traitement.
Les étudiants doivent fournir un manuel d’utilisation et un manuel de maintenance du système. Durant l’évaluation par l’enseignant coordinateur de la dominante, le système de transfert mis au point via le préhenseur pourra être sollicité pour d’autres besoins que le déplacement de la pièce prévue dans le cahier des charges initial. Lors de l’évaluation, l’enseignant teste ainsi la finesse de la conception du modèle retenu par les étudiants et vérifie la justesse de leur programmation.
De quoi s’assurer aussi pour l’enseignant de l’adaptabilité et de l’agilité des étudiants en situation inconnue.
De la programmation (démarrage du cycle, position initiale du bras…) à la précision (dépose de la pièce à l’endroit d’implantation prévu sur le plan), tout en prenant en compte l’ergonomie, la sécurité, la fiabilité et la maintenance (en fournissant l’Indice de Réparabilité de la solution), ce projet de la dominante mécatronique transporte les étudiant.es vers le monde professionnel.
Le projet a révélé presque autant de solutions que d’équipes.